
Buick Electra L7 juhib sõltumatut Hiina AD-testi — Tesla jääb maha
Mõne päeva pärast seda, kui Tesla teatas investoritele, et täielik autonoomia on käeulatuses, andis sõltumatu isesõidu võistlus Hiinas hoopis teistsuguse sõnumi. D1EV korraldatud teisel Hiina Intelligent Assisted Driving võistlusel Ningbos, Zhejiangis, saavutas SAIC-GM Buick Electra L7 17-auto konkurentsis esikoha, samas kui Tesla Model 3 pidi leppima pettumust valmistava üheksanda kohaga.
29-kilomeetrine linnalise ja maapiirkonna seguga rada — mis sisaldas 28 liiklusvalgust, viit kontrollpunkti ja kaheksat nõudlikku testipaika — hoiti saladuses, et vältida meeskondade süsteemide spetsiaalset kohandamist konkreetsete olukordade jaoks. See saladus paljastas praktilised tugevused ja nõrkused paljude edasijõudnud juhiabisüsteemide (ADAS) ja autonoomsete juhtimise tarkvarapakkide seas ning andis väärtuslikke andmeid süsteemide töökindluse kohta reaalsetes, mitmekesistes liiklusolukordades.
Peamised tulemused
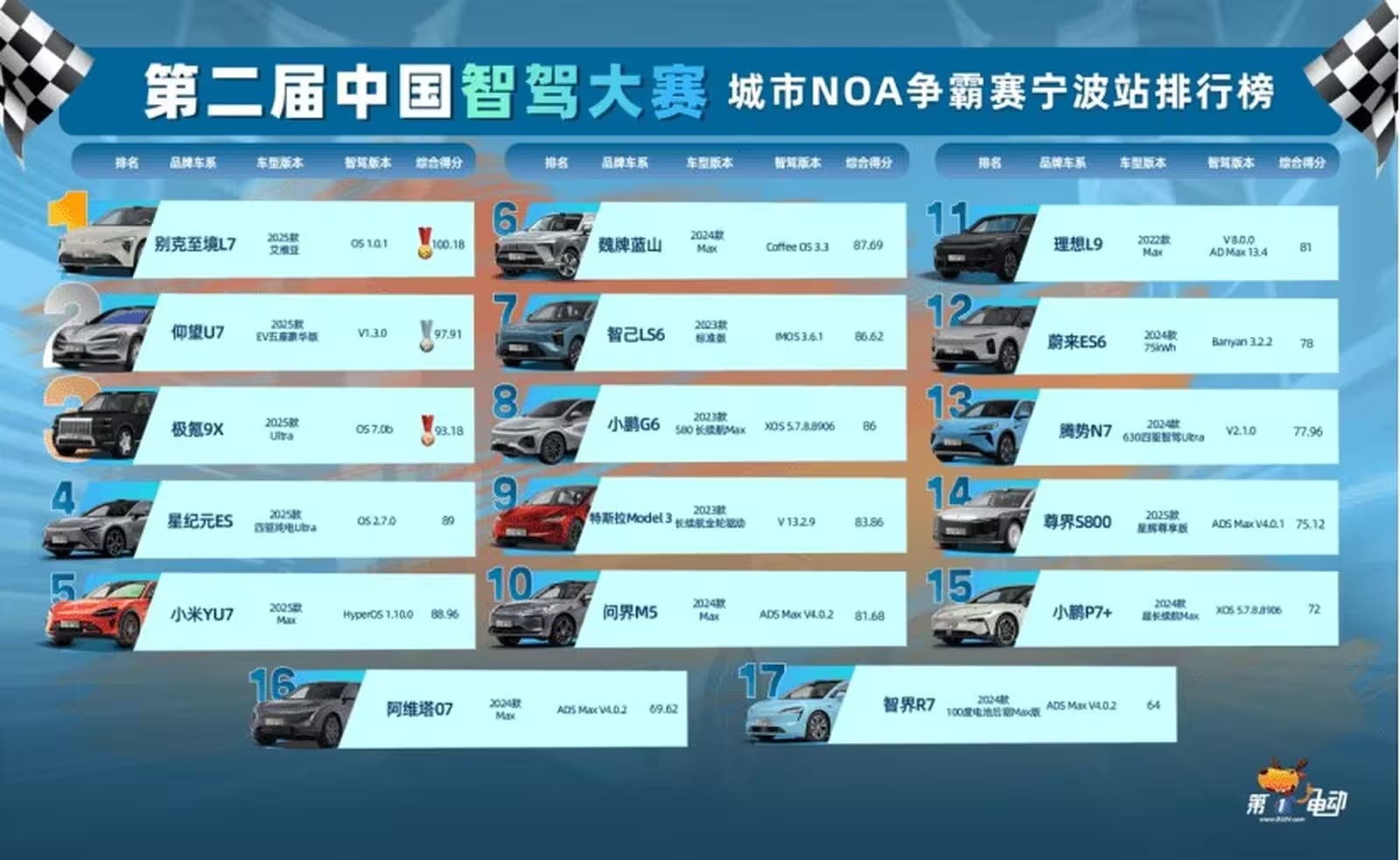
- 1.: Buick Electra L7 (SAIC-GM) — 100.18 punkti
- 2.: BYD YangWang U7 — 97.91 punkti
- 3.: Geely Zeekr 9X — 93.18 punkti
- 5.: Xiaomi YU7 — 88.96 punkti
- 9.: Tesla Model 3 — 83.86 punkti

Need tulemused rõhutavad laiemat suundumust: Hiinas on paljud autotootjad ja tehnoloogiafirmad kiiresti arendanud ADAS- ja isesõidufunktsioone, kasutades sageli LiDARit ja mitme anduri fusiiooni koos kõrgtäpse kaardistuse ja suurte AI-mudelitega. Selline lähenemine — kombineeritud LiDAR, radar, kaamerad ja täppiskaardid — parandab takistuste tuvastamist ja marsruudi planeerimist keerulises linnakeskkonnas ning maanteel.
Miks Electra L7 võitis
Electra L7 on SAIC-GM laiendatud sõiduulatusega elektrisõiduk (EREV), mis ühendab tõhusa jõuülekande tugeva autonoomse tarkvarastakiga. Oluline erinevus oli see, et konkurentsi esimene koht oli varustatud Momenta R6 Flywheel Big Model AD platvormiga, mida kasutati Navigate on Autopilot (NOA) süsteemi osana. Momenta suuremahuline tajumise ja planeerimise mudel rõhutab mitmeandurilist fusiioni — eriti LiDARi kasutust — ning see tundus rajal otsustava eelisena.

Mitu testisegmenti tõi selle eelise ilmseks. Muret tekitavalt läbipaistva plastikust ekraani, mis oli konstrueeritud madala nähtavusega takistuse simulatsiooniks, tuvastasid vaid kuus autot: Li Auto L9, YangWang U7, Nio ES6, Buick Electra L7, Zeekr 9X ja Xiaomi YU7 — kõigil neil oli LiDAR. Näitusepõhised, ainult kaameratele tuginevad süsteemid, sealhulgas Tesla FSD/Intelligent Assisted Driving, jäid selle takistuse suhtes pimedaks. See juhtum illustreerib selgelt, kuidas andurivalik ja sensoriandmete fusiion mõjutavad takistuste tuvastamist ja seeläbi kogu süsteemi turvalisust.
Lisaks osutus Momenta suurtasemeline mudel tugevaks planeerimise komponendiks: see suutis paremini ette näha ja planeerida keerukates ristmike, ümberpööramiste ja piiratud nähtavusega sektsioonide läbinägemiseks. Suuremahulised võrgud ning reaalajas andmete fusiion võimaldasid NOA-l reageerida nüanssidele, mis muidu oleksid võinud nõuda inimest juhile sekkumist.
Raja väljakutsed ja süsteemi käitumine
Rada ühendati kitsaste elamute tänavate, ringristmike, pimedate pöörde U-pööriste, maanteeosa ja kunstlike takistustega, et hinnata navigeerimist, sõidurea valikut, takistuste tuvastamist ja otsustusvõimet. Mõningad tähelepanuväärsed hetked ja käitumismustrid olid järgmised:
- Kitsad teed: need olid mõeldud täpsuse ja vältimise testimiseks; kolm autot nõudsid juhi sekkumist (Wey 07, Xiaomi YU7, Xpeng G6), mis näitab, et täpsus ja collision-avoidance algoritmid pole veel kõikidel platvormidel ühtlaselt küpsed.
- Ringristmikud: kõik osalejad sooritasid ringristmikud edukalt, mis viitab üldisele paranemisele sõidurea valiku ja sildistuse tõlgendamise loogikas.
- Pimedate nurkade U-pöörded: mitmeid sõidukeid tõrkus see manööver; Nio ES6 ja Xpeng G6 kutsusid välja juhi üleandmise, samas kui Denza N7 kaldus navigeerimisest kõrvale — see paljastab raskusi keerukate liikumiste planeerimisel, kus nähtavus ja trajektoori prognoosimine on piiratud.
- Kunstlik läbipaistev takistus: ainult LiDARiga varustatud autod tuvastasid selle järjepidevalt, mis rõhutab sensortehnoloogia tähtsust ohtude identifitseerimisel, eriti madala kontrastsusega objektide puhul.
- Segadust tekitav tagasipöörderada: mitmed mudelid võtsid valesid teid või vajasid sekkumisi, paljastades marsruutide loogilise põhjendamise nõrkused ebamäärase liiklusmärke ja viitade korral.

Kaks täiendavat stsenaariumi — parempööret nõudev ristmik, mis sisaldas ka U-pööret, ja hõredama liiklusega maantee — eraldasid võistlejad veelgi. Tesla Model 3 sooritas parempöörde testi küll edukalt, kuid kogu raja ulatuses jäi selle käitumine vähem järjepidevaks kui esikohale tõusnud platvormidel, mis mõjutas selle koha tabelis keskmises grupis.
Sellised praktilised katsed näitavad, et testide heterogeensus — erinevad nähtavusolud, märgistuse mitmekesisus, ümbrusmüra ja ootamatud takistused — on tugevam mõõdupuu reaalse valmisoleku hindamiseks kui laboris või simulatsioonis tehtud korduvad demo-sõidud.
Mida see tähendab Tesla ja laiemalt AD-turu jaoks
Tesla on avalikult püüdnud rõhutada tehisintellekti suurt rolli robotaksode ja täieliku autonoomia suunas, ning Elon Musk on lubanud järelevalveta sõiduvõimekust 2025. aasta lõpuks. Põhja-Ameerikas keskendub jutt sageli Teslale versus Waymole, kus Waymo juba opereerib piiratud piirkondades juhtideta teenuseid. Kuid Hiina turg on tihedamalt konkurentsitihe ja kiiremini liikuv: kohalikud autotootjad ja tehnoloogiaettevõtted integreerivad LiDARit, kõrgetäpsuskaarte ja suuremahulisi AI-lahendusi, et muuta AD-funktsioonid vastupidavamaks segastes linnalistes ja maapiirkondade kombinatsioonides.
See võistlus annab kaks peamist järeldust:
- Andurivalikul on tähtsus. LiDARiga varustatud süsteemid näitasid selget eeliseid takistuste tuvastamisel ja olukorra teadlikkuses, eriti läbipaistvate või madala kontrastsusega ohtude korral. LiDAR annab kolmemõõtmelise punktipilve, mis aitab tuvastada raskesti näha olevaid objekte ja hinnata nende kaugust ning kuju.
- Lõpust-lõpuni lubadused ei asenda järjepidevat ja olukordade poolt tõestatud jõudlust. Üksik demovideo või investoriteate sõnavõtt ei korva korduvaid, erinevaid maanteetingimusi simuleerivaid välitestimisi avalikel teedel ja võistlusolukordades, kus varjatud stsenaariume testitakse ilma eelteadmata.
Turg ja toote kontekst
Electra L7 võit tõstab SAIC-GM mainet turul, kus tarbijad ja regulaatorid keskenduvad järjest enam ADAS-i ohutusele ja reaalse maailma valideerimisele. Selle edu annab ettevõttele tugevamapositsiooni nii tarbeautode funktsionaalsuse turundamisel kui ka potentsiaalsete autopargioperaatorite usalduse võitmisel, kes hindavad süsteemi korduvust ja töökindlust erinevates tingimustes.
Tesla jaoks on tulemus meeldetuletus, et ainult nägemuspõhine lähenemine — kus kasutatakse üksnes kaameraid ja arvutinägemist — võib teatud kasutusjuhtudel kohata piiranguid, eriti kui suurte mudelite tajumine ja LiDARi täiustatud fusiion on kaasatud konkurentide arhitektuuridesse. See ei tähenda, et nägemissüsteemid on ilma väärtuseta — vastupidi, need on kuluefektiivsed ja oma tugevustega — kuid näitab, et hübriidlahendused võivad hetkel pakkuda praktilisemat reaalmaailma katvust.
Tsiteerides võistluse vaatlejat: "Electra L7 näitas järjepidevat otsustusvõimet mitmesugustes stsenaariumites. See on see, millele kliendid ja autopargioperaatorid pööravad tähelepanu AD-toega autode valimisel." Sellised tähelepanekud mõjutavad nii tarbijate usaldust kui ka regulatiivseid arutelusid, kus tõendid reaalsetest testidest kaaluvad palju.
Edasine vaade ja mõju tööstusele
Oodata on täiendavaid testiringe ja avalikke demonstratsioone, kui autotootjad lihvivad oma NOA ja ADAS funktsioone. Hiina momentum surub tõenäoliselt rohkem koostööid OEM-ide ja AI-ettevõtete vahel (näiteks Momenta) ning võib kiirendada LiDARi kasutuselevõttu keskmise ja kõrgema klassi mudelites. See omakorda soodustab sensorifookusega ökosüsteemi kasvu — sensoritarnijad, tarkvarafirmad ja kaardistusteenuse osutajad saavad selgesti näha turuvõimalusi.
Sõidukijuhtidele ja autopargi ostjatele on lihtne sõnum: keskendu valideeritud süsteemide jõudlusele reaalses maailmas, mitte üksnes lubadustele. D1EV sündmuse sarnased konkurentsid on väärtuslikud, sest need paljastavad süsteemid varjatud, mitmekesiste stsenaariumide ees — see on tugevam valmisoleku näitaja kui ette kirjutatud demo-sõidud. Avalikud katsed ning sõltumatud testid annavad objektiivse pildi, kuidas erinevad tehnoloogiad (LiDAR, radar, kaamerad, HD-kaardistamine ja suured AI-mudelid) toimivad koos reaalses liikluses.
Lisaks mõjutab see suundumuste kooslus regulaatoreid ja kindlustusfirmasid, kes hakkavad üha enam nõudma kolmandate osapoolte katsetulemusi ning standardiseeritud kriteeriumeid ADAS-süsteemide hindamiseks. Sellega kaasneb vajadus läbipaistvuse ja selgete metoodikate järele hindamismudelite kujundamisel, mis võtavad arvesse nii sensortehnoloogia kui ka tarkvaraarhitektuuri eripärasid.
Highlights
- Sündmus: Teine Hiina Intelligent Assisted Driving võistlus, Ningbo
- Rada: 29 km, 28 liiklusvalgust, 5 kontrollpunkti, 8 testipaika
- Võitjate tehnoloogia: Momenta R6 Flywheel Big Model AD Buick Electra L7 peal
- Järeldus: LiDAR + suurmudeliline AI-fusiion ületab hetkel ainult nägemisele põhinevaid lahendusi keerulistes stsenaariumites
Kuna autonoomse juhtimise järele võistlus kuumeneb, on võitjateks need meeskonnad, kes suudavad näidata turvalist ja korduvat jõudlust ettearvamatutel, reaalsetel teedel. See test näitab, et Tesla-l on Hiina kontekstis veel kodutööd teha — eriti kui vanaautode ja kohalike mängijate kombinatsioon uute anduripakkide ja tehisintellekti partnerlussuhetega oma eeliseid tugevdab.
.webp)
"Mind huvitab, kuidas autotööstus muutub ja kuhu see liigub. Iga uus mudel, iga tehnoloogiline samm on osa suuremast loost, mida mulle meeldib jälgida."
Discussion
Leave a Comment