
Väike nurk. Suur erinevus. Mõnikord piisab vaid mõnest kraadist, et auto muutuks ootamatult n-ö kergemaks või kindlamaks. Neljarattavedu ei ole maagia — see on mehaanika kokku puutumine intelligentsiga, kus tagarattad hakkavad kaasa rääkima.
Kas soovid paremat manööverdamist kitsastes linnatingimustes või stabiilsemat käitumist maanteekiirustel? Mõlemad on võimalikud. Roostevaba selgitus: neljarattavedu tähendab, et tagumised rattad pööravad — kas aktiivselt või passiivselt — ning nende liikumine on kooskõlastatud esi- rattarattaga. Sõiduki käitumine muutub nii pöörderaadiuse kui ka kõrgetel kiirustel tehtavate manöövrite korrektsioonivõime poolest.

Tüübid ja toimemehhanism
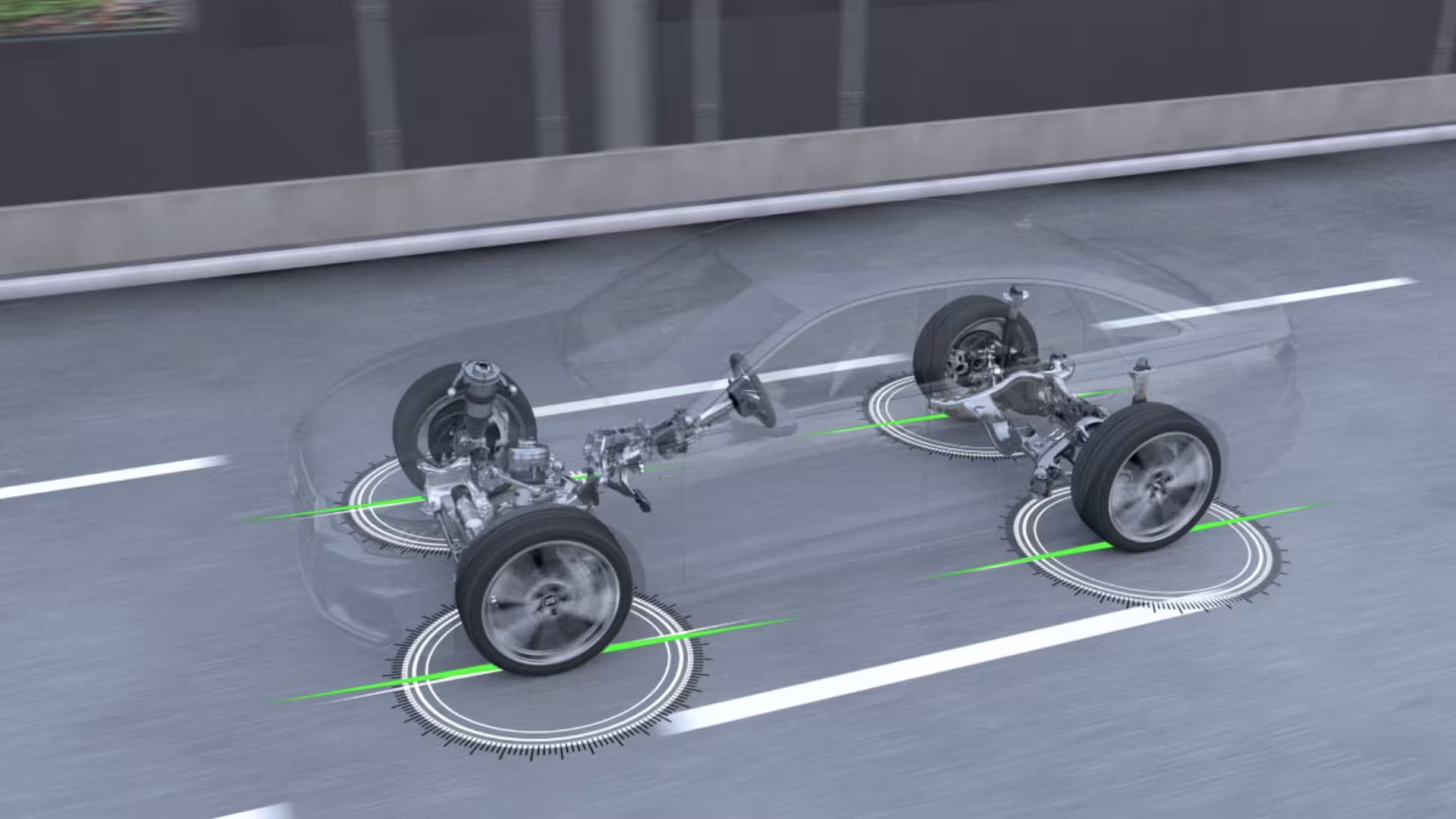
Turul kohtab kahte peamist lähenemist. Esimene on aktiivne neljarattavedu — mehhaanilised, hüdraulilised või elektroonilised süsteemid, mille abil juhitakse tagumist telge. Valdav osa kaasaegsetest lahendustest tugineb anduritele ja juhtarvutile, mis analüüsib kiirust, rooli liikumist ja sõidudünaamikat ning määrab optimaalse nurga. Madalatel kiirustel pööravad tagarattad tihti vastassuunas esi- ratastele; tulemus: oluliselt väiksem pöörderaadius ja hõlpsam parkimine. Kõrgetel kiirustel liiguvad tagarattad kaasa esi- ratastega — see summutab külgset yaw-liikumist ja teeb kiirusedega vahetuste ennustatavamaks.
Teine lähenemine kannab nime passiivne tagarattaste juhtimine. See ei hõlma elektrit ega hüdraulikat, vaid lähtub vedrustuse ja liidete geomeetriast: spetsiaalsed puksid ja raamiosad on disainitud nii, et koormuse muutudes tekib tagarattale väikene sisse- või väljapoole suunatud nurk. Liikumine on minimaalne — mõnikümmend osa kraadist — ent efektiivne teatud sõidutingimustes. See on odavam ja lihtsam lahendus, mille piirangud on selged: reguleerimisvõimalusi napib ning madala kiiruse eelis puudub.
Võiks küsida: kui palju muutub suunatäpsus reaalselt? Enamik aktiivseid süsteeme piirduvad tavaliselt alla kaheksa kraadiga tagaratta pöördest — nähtamatu, kuid tajutav sõiduki reaktsioonis. Lisaks, keerukus toob riskid kaasa: rikete korral võivad tekkida ootamatud käsitsemisomadused ja remondikulud tõusevad.
.avif)
Tehniline taust ja ajalugu
Veel 1970. aastate lõpus tegi Porsche olulise sammu, kui 1977. aastal kasutusele võetud 928 mudelis lõi ta passiivse lahenduse, hiljem tuntud Weissach-teljena. Järgnevalt võtsid sarnaseid lahendusi kasutusele ka teised tootjad, nagu Ford, Peugeot ja Saab. Aktiivsete süsteemide pioneeriks peetakse Nissani: 1985. aastal ilmus HICAS (High Capacity Actively Controlled Steering) R31 Skyline’il. Honda järgnes Prelude’iga 1987. aastal. Tänaseks on aktiivne neljarattavedu leidnud tee premium- ja sportautodesse — Porsche, Mitsubishi, Renault, Ferrari ja BMW on vaid mõned näited.
Oluline tehniline nüanss: passiivne süsteem ei muuda roolisüsteemi loogikat, vaid kasutab mehaanilist iseloomu sõidudünaamika parandamiseks. Aktiivne süsteem seevastu suudab reageerida hetkega, sidudes rooliliigutuse liikumisandurite, kiiruseandurite ja sõidustuuri mudeliga — see on nagu lisakäsi juhile, mis tunnetab olukorda enne kui inimene täielikult reageerib.

Rakendusvaldkonnad ja tulevik
Neljarattaveo väärtus ei piirdu vaid sõiduautodega. Suurema haardega veoautod, bussid ja isegi erisõidukid võivad kasu saada paremast stabiilsusest. Autonoomsed sõidukid vajavad veelgi täpsemat liikumise kontrolli: sleen, kus iga ratas annab sõidukile veidi erineva sisendi, aitab paremini teostada täpseid manöövreid ning vähendab õnnetuste ohtu keerulistes olukordades. Elektrisõidukite arhitektuur — eriti madal raskuskese ja paindliku vedrustusega platvormid — loob soodsa pinnase keerukamate rataste juhtimissüsteemide integreerimiseks.
Kuid kas see lahendab kõik? Ei. Kulud, hooldus ja tarkvara usaldusväärsus on endiselt küsimärgid. Ühtlasi nõuavad tehnoloogiad põhjalikku testimist erinevates kliimatingimustes ja teelagedutel, sest käitumine võib muutuda märgatavalt lume, vee või kulunud katte puhul.
Expert Insight
"Neljarattavedu annab insenerile lisavõimaluse mõjutada auto dünaamikat viisil, mida traditsiooniline rool ei lase," ütleb Dr. Marek Tamm, sõidukite dünaamika spetsialist. "Kui süsteem on hästi kalibreeritud, tunneb juht väikest abi ja sõiduki käitumine muutub sujuvaks. Kui aga häälestus jääb maha või tarkvara ei ole piisavalt robustne, muutub abi segavaks."
Edaspidine arendus suunab rohkem tarkvarapõhise juhtimise poole. Selle tulemusena võivad tulevased süsteemid teha koostööd teede infrastruktuuri ja teiste sõidukitega, täiustades nii turvalisust kui ka liiklusvoogu. Mõned automargi eksperimendid juba demonstreerivad, kuidas väiksed tagaratta pöörded vähendavad koormust rehvidele ja säästavad kütust — peen ent ootuspärane tulemus.
Kui peeglisse vaadata, näeme, et neljarattavedu ei ole pelgalt tehniline trikk, vaid loogiline samm parema juhitavuse poole. Järgmine kord, kui autot proovid, vaata, kuidas see kurvis käitub: võib-olla räägib tagaratas sinuga juba natuke kaasa.

"Autod on minu kirg juba lapsepõlvest saadik. Pistonis kirjutan selleks, et jagada oma huvi mootorite, disaini ja sõidunaudingute vastu."
Discussion
Leave a Comment